Video-based (V-PCC) & Geometry-based (G-PCC)
The development of MPEG point cloud compression standards was initially driven by the distinction between dense and sparse point clouds, each requiring specialized compression techniques. Two primary standards have emerged: Video-based Point Cloud Compression (V-PCC) for dense point clouds and Geometry-based Point Cloud Compression (G-PCC) for sparse point clouds. Advancements in G-PCC have led to three additional branches: Enhanced G-PCC (E-G-PCC), Geometry for Solid (GeS), and Low Complexity, Low Latency LiDAR Coding (L3C2), each targeting specific application needs. These standards provide tailored solutions for various use cases, including real-time streaming and high-quality visualization. Overall, MPEG's strategies ensure that point cloud compression remains effective and relevant across diverse industries such as media, gaming, autonomous driving, and robotics.
Public Reference Software
V-PCC Test Model — mpeg-pcc-tmc2
The V-PCC Test Model (TMC2) is the official open-source implementation of the Video-based Point Cloud Compression standard. It demonstrates the full V-PCC pipeline — patch segmentation, atlas generation, video encoding and decoding — and serves as the primary reference for interoperability testing and research.
Repository: github.com/MPEGGroup/mpeg-pcc-tmc2
V-PCCAtlas generationReference codecG-PCC Test Model — mpeg-pcc-tmc13
The G-PCC Test Model (TMC13) implements the Geometry-based Point Cloud Compression algorithms standardized in ISO/IEC 23090-9. It includes geometry and attribute coding tools, octree occupancy, predictive transforms, and dynamic point cloud support. The reference ensures reproducible performance across implementations.
Repository: github.com/MPEGGroup/mpeg-pcc-tmc13
G-PCCOctreePredictionPoint Cloud Quality Metrics — mpeg-pcc-dmetric
The Metric software provides quantitative evaluation of distortion between original and reconstructed point clouds. It computes geometry (D1/D2) and attribute metrics defined in the Common Test Conditions, enabling objective benchmarking of V-PCC and G-PCC performance.
Repository: github.com/MPEGGroup/mpeg-pcc-dmetric
MetricsEvaluationCTCMPEG 3D Graphics Renderer — mpeg-3dg-renderer
The MPEG 3D Graphics Renderer is the official visualization software maintained by ISO/IEC JTC 1/SC 29/WG 7. It provides reference rendering for static and dynamic point clouds and mesh objects.
Repository: github.com/MPEGGroup/mpeg-3dg-renderer
RendererVisualizationPlaybackAll repositories are maintained by ISO/IEC JTC 1/SC 29/WG 7 under the official MPEGGroup GitHub organization. They are freely available for research, development, and interoperability testing.
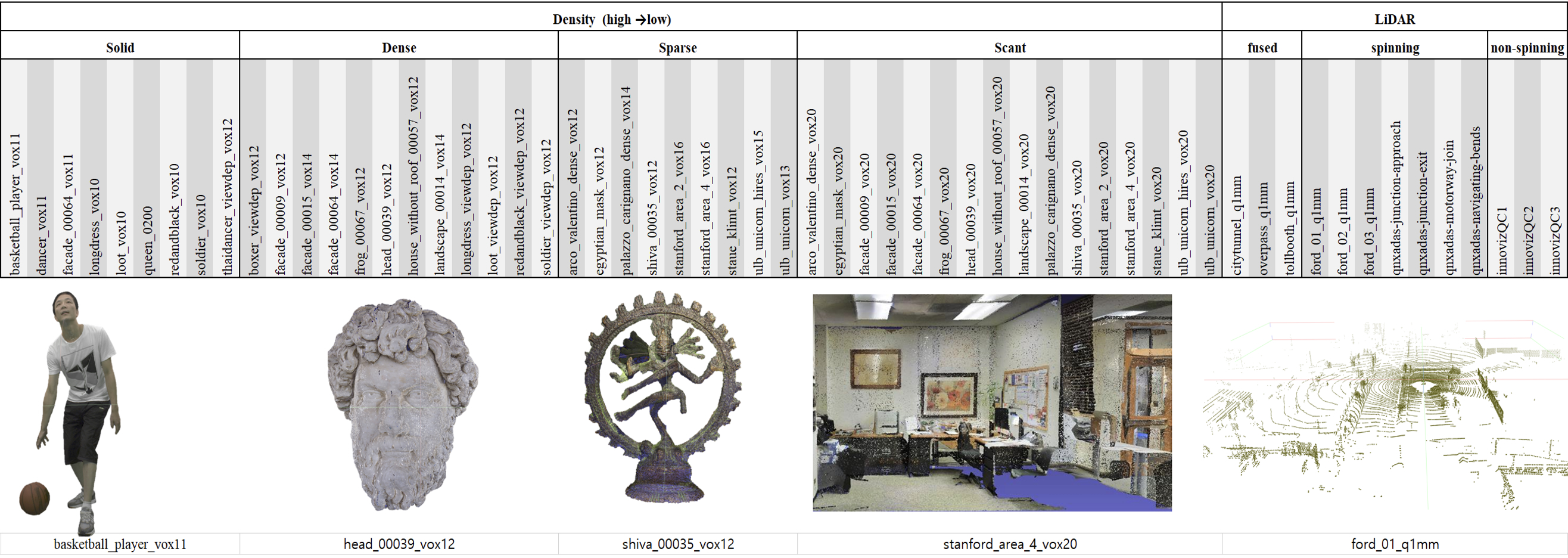
Dense vs sparse point clouds
The basic split
Dense point clouds typically sample surfaces uniformly and in high detail, which makes them well suited for 2D atlas projection and video-based compression (V-PCC). This approach efficiently exploits temporal coherence and hardware video decoders, and is particularly effective for humans, objects, and other dense dynamic scenes. In contrast, sparse or irregular point clouds, such as LiDAR scans or mapping data, do not project well into atlases and would waste bandwidth on empty pixels. For these, geometry-based compression (G-PCC) is more appropriate, as it codes points directly in 3D using hierarchical data structures. This basic split between dense/projectable and sparse/irregular content motivated the original two-track MPEG standardization.
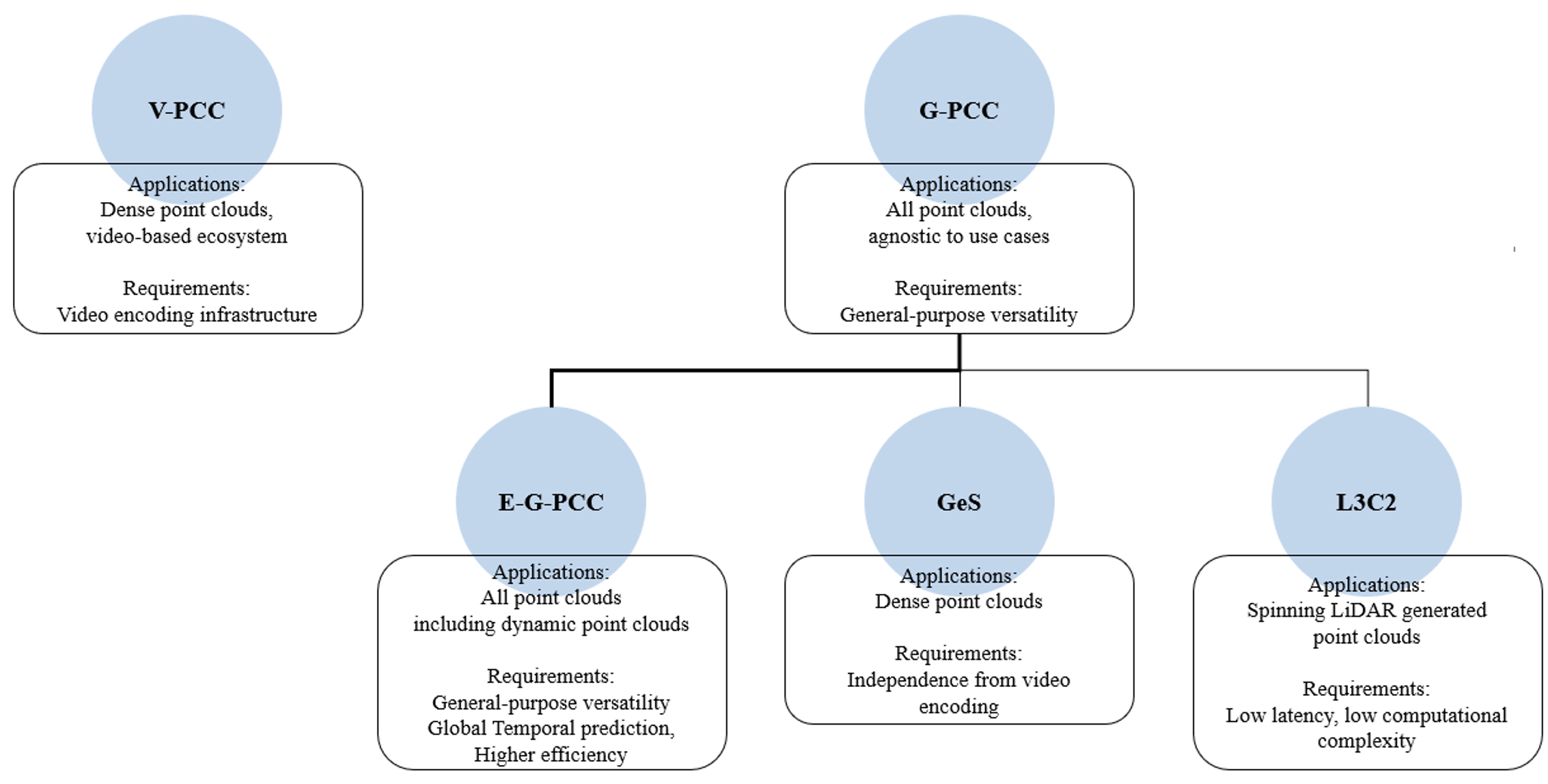
DenseSparseLiDARThe advanced split of G-PCC
The original dense vs. sparse dichotomy is only a first-order view of the PCC landscape. Within the G-PCC framework, MPEG has progressively introduced specialized branches to address more complex scenarios. Enhanced G-PCC (E-G-PCC) extends the baseline with advanced temporal prediction, significantly improving coding of dynamic and time-evolving point clouds. GeS (Geometry for Solid) targets dense or solid objects where the surface behaves more like a continuous manifold than a sparse scatter, bridging some of the performance gap with V-PCC while staying purely geometry-based. Finally, L3C2 is a low-complexity, low-latency branch designed around the acquisition patterns of spinning LiDAR, enabling efficient real-time processing for autonomous driving and robotics. Together, these branches form an advanced split of G-PCC that maps directly onto content categories such as dynamic, dense/solid, or LiDAR-driven point clouds.
Categories of MPEG PCC test contents
Standards family
Core standards
- V-PCC — ISO/IEC 23090-5 (with V3C) — Published IS 2023
- G-PCC — ISO/IEC 23090-9 — Published IS 2023
V-PCC leverages video codecs via atlases; G-PCC operates natively in 3D.
New branches (under the G-PCC framework)
- E-G-PCC — enhanced temporal prediction for dynamics,in addition to improved coding performances as compared to G-PCC (23090-38, under development)
- GeS — Geometry for Solid, dense content focused (pre-WD track)
- L3C2 — Low Complexity, Low Latency LiDAR Coding (23090-30, FDIS 2025)
These address any content (as G-PCC), dense solids (static and dynamic), and spinning LiDAR respectively.
V-PCC — Video-based Point Cloud Compression
How it works
Segments the point cloud into surface patches, parameterizes and packs them into atlases, and compresses geometry/attributes with a video codec. HW decoders can be reused for high throughput.
AtlasesVideo codecsHW-friendlyWhere it shines
Dense, temporally coherent content (humans, objects, telepresence) and delivery over existing video pipelines.
G-PCC & branches — Geometry-based compression
G-PCC
Compresses directly in 3D using octree occupancy and prediction/transform tools for geometry and attributes. Versatile across static/dynamic, dense/sparse, including LiDAR.
E-G-PCC
Adds temporal prediction across frames and optimizations that improve dynamic content compression and static efficiency; published as a new part for clarity and compatibility.
GeS
Geometry for Solid targets dense/solid point clouds to approach V-PCC-like performance without relying on the video coding ecosystem, relying on local motion compensation and optimized decoding pipeline.
L3C2
Tailored for spinning LiDAR with known acquisition order; very low latency/complexity using OneChain attribute coding and joint geometry/attribute processing.
Applications & requirements
Suitability snapshots
V-PCC vs G-PCC (by content category)
| Standard | Suitability |
|---|---|
| V-PCC | Solid / Dense |
| G-PCC | Sparse / Scant / LiDAR |
Branches of G-PCC
| Standard | Suitability |
|---|---|
| E-G-PCC | Sparse / Scant / LiDAR |
| GeS | Solid / Dense |
| L3C2 | Spinning LiDAR |
Suitability summarizes expected performance by content class.
Use cases & recommendations
| Use case | Recommended standard |
|---|---|
| Mobile visualization of a dense static object (gaming asset) | GeS |
| Sparse dynamic point cloud for autonomous driving | G-PCC / E-G-PCC |
| Dense dynamic point cloud for real-time VR simulation | V-PCC / GeS |
| Dense dynamic point cloud for real-time AR | V-PCC / GeS |
| Streaming a dense static point cloud over a video-based network | V-PCC |
| Spinning LiDAR for low-latency robotics detection | L3C2 |
| Use case | Recommended standard |
|---|---|
| Archiving sparse static cultural-heritage scans | G-PCC / E-G-PCC |
| Real-time traffic monitoring with dynamic spinning LiDAR | L3C2 |
| High-quality dense point clouds for cinematic rendering | V-PCC |
| Remote structural analysis with sparse dynamics | E-G-PCC |
| Urban planning with dense static city blocks | GeS / E-G-PCC |
Illustrative mapping; actual choice depends on bitrate, latency, and infrastructure constraints.
Official resources
Standards
- ISO/IEC 23090-5 — V3C & V-PCC (IS)
- ISO/IEC 23090-9 — G-PCC (IS)
- ISO/IEC 23090-38 — Enhanced G-PCC (under development)
- ISO/IEC 23090-30 — L3C2 (DIS/FDIS)
Also see MPEG pages for V3C/V-PCC, G-PCC, and L3C2 for news and updates.
Public introductions & material
Open-source projects using MPEG V-PCC / G-PCC
uvgVPCCenc — Practical open-source V-PCC encoder
uvgVPCCenc is an academic, open-source volumetric video encoder implementing a practical pipeline for MPEG Video-based Point Cloud Compression (V-PCC). It is designed as a research platform for experimenting with new coding tools while also providing a usable encoder for public deployment. The implementation is written in C++ and distributed under a permissive BSD-3-Clause license, targeting Linux-based workflows.
More information: uvgvpccenc.html
Main project page: ultravideo.fi/uvgvpccenc.html
GitHub: github.com/ultravideo/uvgVPCCenc
This section highlights community and academic open-source projects that build on MPEG PCC standards. If you maintain an open-source V-PCC/G-PCC project and want it listed here, please contact the page maintainer.
FAQ
V-PCC vs G-PCC — quick difference?
V-PCC projects to 2D atlases and uses video codecs (easy HW reuse, strong for dense surfaces); G-PCC stays in 3D (versatile across densities and LiDAR).
Do I need both?
Many systems implement both and choose per content/workflow. Branches (E-G-PCC, GeS, L3C2) further tailor to dynamics, dense solids, and spinning LiDAR.
© ISO/IEC JTC 1/SC 29 — MPEG 3D Graphics & Haptics (WG 7). This page summarizes PCC for information purposes. For normative details, consult the official specification(s).